
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- 판다스
- 애자일
- Agile
- webcrawling
- adaptive life cycle
- data
- Project
- matplotlib
- angular
- analyzing
- keras
- 자바스크립트
- ECS
- TypeScript
- 다나와
- visualizing
- Crawling
- DANAWA
- 프로젝트
- opencv
- javascript
- 크롤링
- data analyze
- Scrum
- tensorflow
- pandas
- Method
- AWS
- algorithm
- python
Archives
- Today
- Total
LiJell's 성장기
Convolution Neural Network (CNN) 본문
반응형
CNN
- Fully-Connected Layer만으로 구성된 인공신경망의 입력 데이터는 1차원 형태로 한정
- Flatten → Dense → 1차원
- 사진 데이터로 FC 신경망을 학습시키는 경우, 사진 데이터를 1차원으로 변환 → 공간정보 의 손실 → 정보 부족으로 특징 추출 및 학습이 비효율적이고 정확도를 높이는데 한계
- 이미지의 공간정보를 유지한 상태로 학습 가능한 모델이 CNN
- CNN의 특징
- 각 레이어의 입출력 데이터의 형상 유지
- 이미지의 공간 정보를 유지하면서 인접 이미지와의 특징을 효과적으로 인식
- 복수의 필터로 이미지의 특징 추출 및 학습
- 셀로판지 느낌
- 추출한 이미지의 특징을 모으고 강화하는 Pooling layer
- 필터를 공유 파라미터로 사용하기 때문에, 일반 인공 신경망과 비교하여 학습 파라미터 가 매우 적음

- 이미지의 특징을 추출(feature extraction)하는 부분과 클래스를 분류(classification)하는 부 분으로 나눌 수 있음
- 특징 추출 영역은 convolution layer와 pooling layer를 여러 겹 쌓는 형태로 구성
- Convolution layer는 입력 데이터에 필터를 적용 후 활성화 함수를 반영하는 필수 레이어
- Conv. Layer 다음에 위치하는 pooling layer는 선택적 레이어
- 마지막 부분에는 이미지 분류를 위한 fully-connected layer가 추가
- 이미지의 특징을 추출하는 부분과 이미지를 분류하는 부분 사이에 이미지 형태의 데이터를 배열 형태로 만드는 flatten layer가 위치
Convolution
- '데이터 전체를 보는 것이 아니라 부분을 보는 것'이 핵심 아이디어
- '부분'에 해당하는 것을 filter라고 함

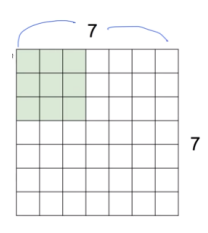
- Example)
- 7x7 image, 3x3 filter
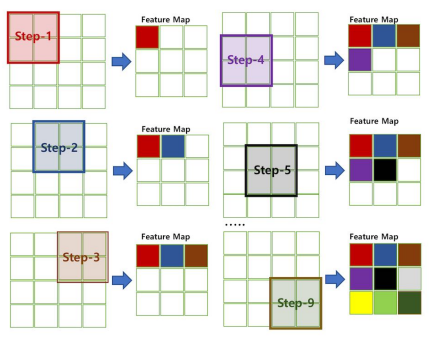
- filter를 옮겨 가며 이미지를 봄 - 옮기는 양을 stride라고 함
- stride가 2면 2칸씩 이동
- stride = 1
- 각 스텝마다 1개의 값을 얻음 → 총 5x5의 출력을 얻게 됨
- Total size: N (i.e. NxN)
- 7x7
- Filter size: F (i.e. FxF)
- 3x3
- Output size: k = (N-F)/stride + 1 where k is an integer
- k = (7-3)/1+1 = 5
- 이 연산의 출력을 convolution layer라고 함

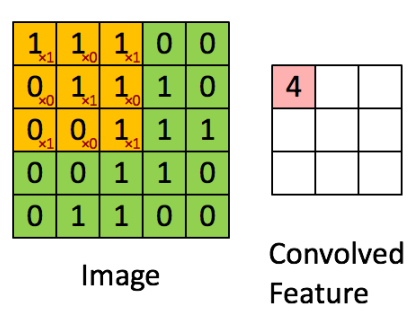
- 각 필터마다 convolution layer를 얻을 수 있음
- 6개의 필터로부터 6개의 convolution layer를 얻음 → N=7, F=3 이므로 5x5 convolution layer 6개가 만들어 짐 → 5x5x6 convolution layers (activation maps)
- Activation maps까지 얻는 일련의 과정을 convolution이라 함
- convolution은 한번만 할 수도 있지만 상황에 따라서는 여러번 convolution을 할 수도 있음
- 5x5x6 activation maps이 나왔으므로, 이를 새로운 이미지로 보고 앞의 과정을 반복
Channel
- 이미지 픽셀 각각은 실수로 표현
- 컬러 이미지는 색을 표현하기 위해 각 픽셀을 RGB 3개의 실수로 표현한 3차원 텐서
- Example
- 컬러 이미지 → 3개의 채널(RGB)로 구성. 31(w)x39(h) 의 shape는 (39,31,3)
- 흑백 이미지 → 1개 채널 (명암). 31(w)x39(h) 의 shape는 (39,31,1)
- Conv. layer에 들어가는 입력 데이터에는 한개 이상의 필터가 적용됨 → 1개 필터는 feature map의 채널이 됨. Conv. Layer에 n개의 필터가 적용 → 출력 데이터는 n개의 채널
Filter (Kernel)
- 이미지의 특징을 찾아내기 위한 공용 파라미터
- kernel이라고 하기도 함
- (3,3) 또는 (4,4) 같은 정사각형 행렬로 정의
- CNN에서 학습 대상은 필터 파라미터
- 지정된 간격(stride)으로 이동하면서 전체 입력 데이터(image)와 convolution하여 feature map을 만듬

- 하나의 convolution layer에 크기가 같은 여러개의 필터를 적용할 수 있음 → Feature map에 필터 갯수 만큼의 채널이 만들어 짐
- 입력 데이터에 적용한 필터의 갯수는 출력 데이터인 feature map의 채널이 됨
- Convolution layer의 입력 데이터를 필터가 순회하며 convolution을 통해 만든 출력 → Feature map 또는 Activation Map
- Feature map은 convolution으로 만들어 진 행렬
- Activation map은 feature map 행렬에 활성함수를 적용한 결과 → convolution layer의 최종 출력 결과가 activation map
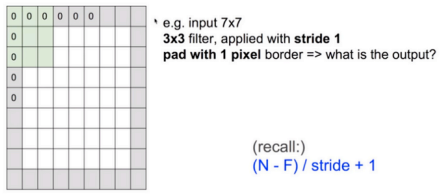
Padding
- Convolution layer의 사이즈 k는 일반적으로 N보다 작거나 같음 (stride≥1, F≥1)
- K = (N-F) / stride + 1 <= N-F+1 = N-(F-1) <= N
- 7x7 data가 convolution을 거쳐 5x5 data가 됨 → 상당량의 데이터 손실
- Convolution layer의 출력 데이터가 줄어드는 것을 방지하는 방법
- 7x7 형태를 그대로 유지 → zero padding technique
- Zero padding으로 확장된 9x9 이미지에 convolution을 하면 7x7 convolution layer가 출력됨
- Total size: N
- Filter size: F
- Stride: s
- Padding size: p
- Convolution layer size after padding: k = [(N+2p)-F] / s + 1
- k = N if and only if p=[(N-1)s+F-N]/2
padding 단점
- Padding으로 인한 노이즈가 발생
- 하지만 padding 없이 convolution 하는 것으로 인해 발생하는 데이터 손실보다 영향 이 작음
- 단점보다 장점이 더 큼
pooling
- Convolution을 거쳐 나온 activation maps이 있을 때, 이를 이루는 convolution layer를 resize하여 새 로운 layer를 얻는 것
- 출력 데이터의 크기를 줄이거나 특정 데이터를 강조하 는 용도로 사용
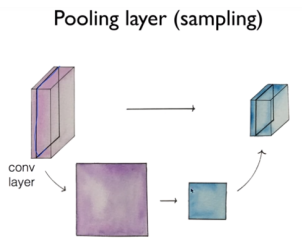
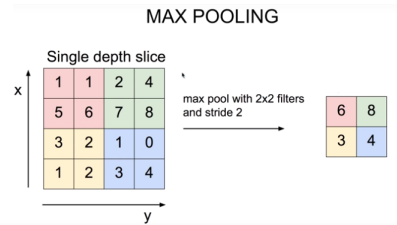
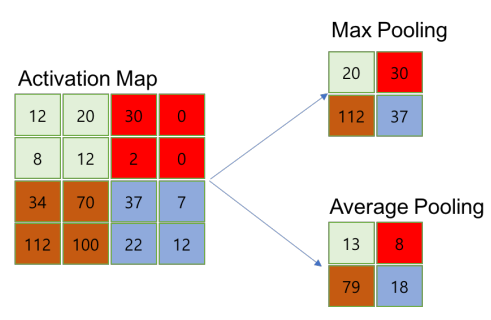
- Max pooling, Mean pooling 등
- 일반적으로 pooling 크기와 stride를 같은 크기로 설정하며 모든 원소가 한번씩 처리되 도록 설정
- Pooling layer의 특징
- 학습 대상 파라미터가 없음
- Pooling layer를 통과하면 행령 크기가 감소
- Pooling layer를 통해 채널 수 변경 없음
- Pooling 의 목적 → Overfitting을 방지
- Example)
- 96x96 크기의 image (feature 수는 96 x 96개)
- 400개의 filter로 convolution한 size 8 x 8 x 400의 convolution layer
- 각 convolution layer에는 (96-8+1) x (96-8+1)=89+89=7921개의 feature (stride = 1)
- 400개의 filter → 총 feature 수는 89 x 89 x 400 = 3,168,400개
- overfitting의 가능성이 커짐
- Padding과 pooling을 통해 적절히 조절
Example
- Padding
import tensorflow as tf
t = tf.constant([[1,2,3], [4,5,6], [7,8,9]])
pad = tf.constant([[1,1],[1,1]])
print(t)
'''
tf.Tensor(
[[1 2 3]
[4 5 6]
[7 8 9]], shape=(3, 3), dtype=int32)
'''
print(tf.pad(t, pad, "CONSTANT"))
'''
tf.Tensor(
[[0 0 0 0 0]
[0 1 2 3 0]
[0 4 5 6 0]
[0 7 8 9 0]
[0 0 0 0 0]], shape=(5, 5), dtype=int32)
'''CNN 구성
- Conv. layer와 Max pooling layer를 반복적으로 stacking하는 특징 추출(feature extraction) 부분과 Fully-connected Layer를 구성하고 마지막 출력층에 softmax를 적용한 분류 부분으로 구성
- Filter, Stride, Padding을 조절하여 특징 추출 부분의 입력과 출력 크기를 계산하고 맞추는 작업이 중요
from keras.models import Sequential
from keras.layers.convolutional import Conv2D
from keras.layers.convolutional import MaxPooling2D
from keras.layers import Dense
from keras.layers import Flatten
model = Sequential()
# kernel_size = filter_size
model.add(Conv2D(12, kernel_size=(5, 5), activation='relu', input_shape=(120, 60, 1)))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Conv2D(16, kernel_size=(5, 5), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Conv2D(20, kernel_size=(4, 4), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
# 여기까지 2D
# 여기서 부터 1D
model.add(Flatten())
model.add(Dense(128, activation='relu'))
# 마지막 출력은 4개
model.add(Dense(4, activation='softmax')) CNN 입출력, 파라미터 계산
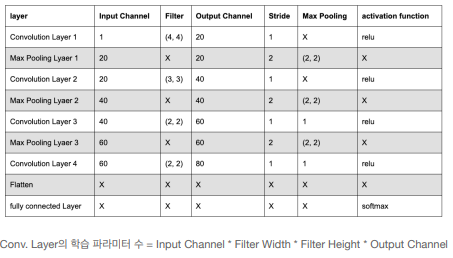
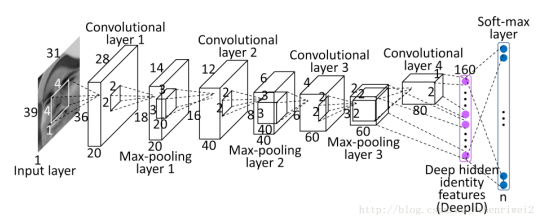
- 다음과 같은 조건의 이미지를 학습하는 CNN 각 레이어 별 입출력 데이터의 shape, 네트워크가 학습시키는 파라미터의 개수를 계산
- 입력데이터 shape: (39,31,1)
- 분류 클래스: 100
- Layer 1의 shape와 파라미터 → 1개의 conv. layer와 1개의 pooling layer로 구성
- Conv. Layer 1
- 입력데이터 shape : (39, 31, 1)
- 입력채널: 1
- 필터: (4, 4)
- 출력 채널: 20
- Stride: 1
- 입력 이미지에 (4,4)인 필터 20개를 적용할 경우, 출력 데이터(activation map)의 shape
- Activation Map의 shape는 (36, 28, 20)
- Input Ch. 1, Filter shape (4, 4), Output Ch. 20 → 학습 파라미터 = 4 * 4 * 20 =320
- 입력 채널: 1
- 출력 데이터 (activation map) shape: (36,28,20)
- 학습 파라미터: 320개

- Max Pooling Layer 1
- 입력데이터 shape : (36, 28, 20)
- Max Pooling size: (2, 2)
- 입력 채널: 20
- 출력 데이터 shape: (18, 14, 20)
- 학습 파라미터: 0
- Conv. Layer 1
- Layer 2의 shape와 파라미터
- Conv. Layer 2
- 입력데이터 shape : (18, 24, 20)
- 입력채널: 20
- 필터: (3, 3, 40)
- 출력 채널: 40
- Stride: 1
- 입력 채널: 20
- 출력 데이터 (activation map) shape: (16, 12, 40)
- 학습 파라미터: 7200개 (20 * 3 * 3 * 40)
- Max Pooling Layer 2
- 입력데이터 shape : (16, 12, 40)
- Max Pooling size: (2, 2)
- 입력 채널: 40
- 출력 데이터 shape: (8, 6, 40)
- 학습 파라미터: 0
- Conv. Layer 2
- Layer 3의 shape와 파라미터
- Conv. Layer 3
- 입력데이터 shape : (8, 6, 40)
- 입력채널: 40
- 필터: (3, 3)
- 출력 채널: 60
- Stride: 1
- 입력 채널: 40
- 출력 데이터 (activation map) shape: (6, 4, 60)
- 학습 파라미터: 9600개 (40 * 3 * 3 * 60)
- Max Pooling Layer 3
- 입력데이터 shape : (6, 4, 60)
- Max Pooling size: (2, 2)
- 입력 채널: 60
- 출력 데이터 shape: (3, 2, 60)
- 학습 파라미터: 0
- Conv. Layer 3
- Layer 4의 shape와 파라미터 → 1개의 conv. layer로 구성
- Conv. Layer 4
- 입력데이터 shape : (3, 2, 60)
- 입력채널: 60
- 필터: (2, 2)
- 출력 채널: 80
- Stride: 1
- 입력 채널: 60
- 출력 데이터 (activation map) shape: (2, 1, 80)
- 학습 파라미터: 320 (2 * 2 * 80)
- Conv. Layer 4
- Flatten Layer → CNN의 데이터타입을 fully-connected neural network의 형태로 변 경하는 레이어. 파라미터가 존재하지 않고 입력 데이터 shape 변경만 수행
- 입력 데이터 shape: (2, 1, 80)
- 출력 데이터 shape: (160, 1)
- Softmax Layer → 분류 클래스가 100개이므로 출력은 (100,1)
- 입력 데이터 shape: (160, 1)
- 출력 데이터 shape: (100, 1)
- Weight shape는 (100, 160) → 파라미터는 160000
Summary
- CNN은 이미지 공간 정보를 유지하면서 인접 이미지와의 특징을 효과적으로 인식하고 강조하는 방식으로 이미지의 특징을 추출하는 부분과 이미지를 분류하는 부분으로 구성
- 특징 추출 영역은 필터를 사용하여 공유파라미터 수를 최소화 하면서 이미지의 특징을 찾는 conv. 레이어와 특징을 강화하고 모으는 pooling layer로 구성
- CNN은 필터의 크기, stride, padding과 pooling크기로 데이터 크기를 조절하고 필터의 개수로 출력 데이터의 채널을 결정
- CNN은 같은 레이어 크기의 FC neural network에 비해 학습 파라미터의 양은 20%규모. 은닉층이 깊어질수록 학습 파라미터의 차이는 더 커짐. CNN은 FC neural network 에 비해 더 적은 학습 파라미터로 더 높은 인식률을 제공
Tutorial
- Tensorflow import
import tensorflow as tf
from tensorflow.keras import datasets, layers, models
import matplotlib.pyplot as plt- Download CIFAR10 dataset
- CIFAR10 contains 60000 color images in 10 classes, with 6000 images in each class
- 50000 training images & 10000 test images
- Classes are mutually exclusive and no overlap between them
(train_images, train_labels), (test_images, test_labels) = datasets.cifar10.load_data()
# Normalize pixel values to be between 0 and 1
# float으로 하기 위해 255가 아닌 255.0으로 나누어 줌
train_images, test_images = train_images / 255.0, test_images / 255.0- Verify the data
class_names = ['airplane','automobile','bird','cat','deer',
'dog','frog','horse','ship','truck']
plt.figure(figsize=(10, 10))
for i in range(25):
plt.subplot(5,5,i+1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
plt.imshow(train_images[i], cmap=plt.cm.binary)
# The CIFAR labels happen to be arrays,
# which is why you need the extra index
plt.xlabel(class_names[train_labels[i][0]])
plt.show()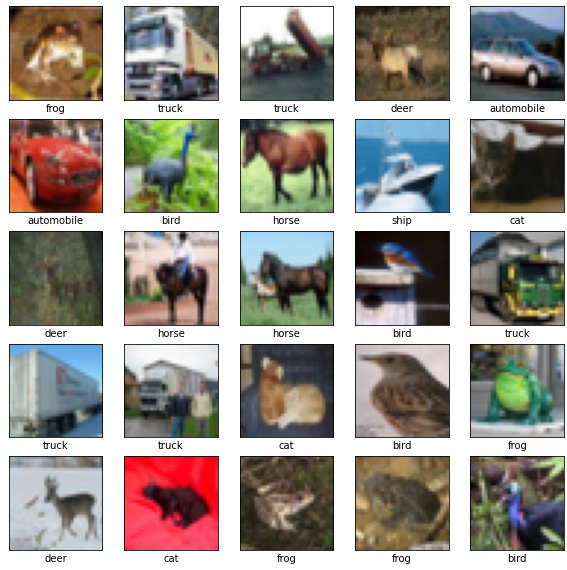
- Create the convolutional base
model = models.Sequential()
model.add(layers.Conv2D(32, (3,3), activation = 'relu', input_shape = (32,32,3)))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(64, (3,3), activation = 'relu'))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(64, (3,3), activation = 'relu'))- Architecture of the model
model.summary()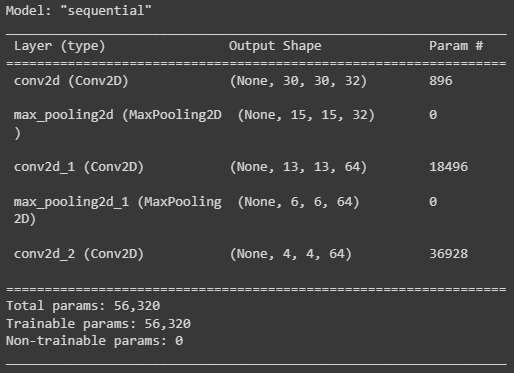
- Add Dense Layers on top
model.add(layers.Flatten())
model.add(layers.Dense(64, activation='relu'))
model.add(layers.Dense(10, activation = 'softmax'))- Architecture of the model
model.summary()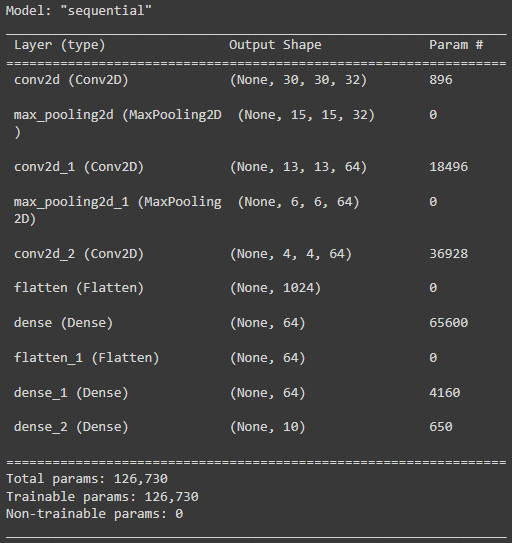
- Compile and train the model
model.compile(optimizer = 'adam',
loss = tf.keras.losses.SparseCategoricalCrossentropy(from_logits = True),
metrics = ['accuracy'])
history = model.fit(train_images, train_labels, epochs = 10,
validation_data=(test_images, test_labels))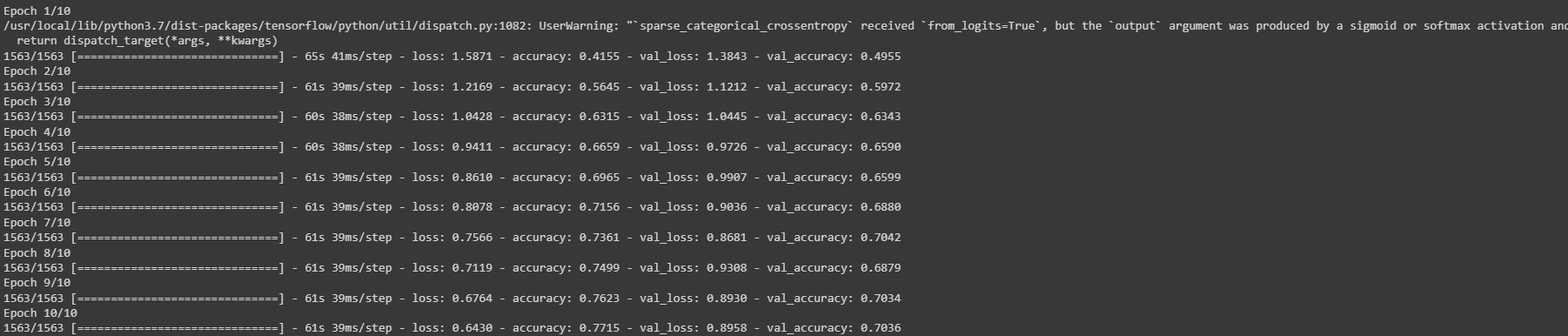
- Evaluate the model
plt.plot(history.history['accuracy'], label='accuracy')
plt.plot(history.history['val_accuracy'], label = 'val_accuracy')
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
plt.ylim([0.5, 1])
plt.legend(loc='lower right')
test_loss, test_acc = model.evaluate(test_images, test_labels, verbose=2)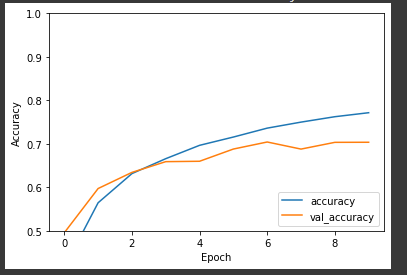
print(test_loss)
print(test_acc)
'''
0.7035999894142151
0.895819902420044
'''반응형
'Bigdata > TensorFlow' 카테고리의 다른 글
| Convnet Visualization (0) | 2022.03.14 |
|---|---|
| Transfer Learning II (0) | 2022.03.10 |
| Tranfer_Learning (0) | 2022.03.08 |
| CNN for MNIST (0) | 2022.03.07 |
| Neural Network (0) | 2022.03.04 |
'Bigdata/TensorFlow' Related Articles
more




Comments